ทางเลือกของผู้อ่าน





บทความยอดนิยม
ทุกอย่างเกี่ยวกับการเข้ารหัสแน่นอน จาก A ถึง Z: ประเภทของรหัสดิจิตอลคุณสมบัติของการเข้ารหัส / ถอดรหัสสัญญาณในเอนโค้ดเดอร์สัมบูรณ์รายละเอียดของการทำงานของเอ็นโค้ดเดอร์สัมบูรณ์การสร้างเอนโค้ดเดอร์แบบซิงเกิลและมัลติเทิร์น เอกสารประกอบสำหรับเครื่องเข้ารหัสแน่นอน แน่นอนหรือเพิ่มขึ้น? เมื่อการใช้ตัวเข้ารหัสสัมบูรณ์มีความชอบธรรมหรือหลีกเลี่ยงไม่ได้
ทำไมเราต้องใช้โปรแกรมเปลี่ยนไฟล์
ในการสร้างเครื่องจักรและเครื่องมือเครื่องจักรข้อมูลตำแหน่งที่ถูกต้องแม่นยำล่าสุดนั้นจำเป็นสำหรับการวางตำแหน่งของระบบควบคุมการเคลื่อนไหวอย่างถูกต้อง เนื่องจากความสามารถในการกำหนดค่าตำแหน่งที่ถูกต้องและแม่นยำของตำแหน่งเชิงมุมหรือตำแหน่งใด ๆ ของการเคลื่อนไหวได้ตลอดเวลามุมของเซ็นเซอร์การหมุนจึงกลายเป็นหนึ่งในการเชื่อมต่อที่สำคัญที่สุดเชื่อมต่อระหว่างส่วนกลไกของเครื่องและชุดควบคุม
ประวัติความเป็นมาของการสร้างตัวเข้ารหัสการหมุนแบบสัมบูรณ์ครั้งแรกและความแตกต่างหลักจากส่วนเพิ่ม
เซ็นเซอร์แบบสัมบูรณ์ตัวแรกซึ่งหลักการทำงานขึ้นอยู่กับการอ่าน optoelectronic ของ rasters รหัสได้รับการพัฒนาโดย บริษัท เยอรมัน FRABA ในปี 1973 ในขณะที่เซ็นเซอร์ที่เพิ่มขึ้นจะกำหนดตำแหน่งเฉพาะที่สัมพันธ์กับตำแหน่งที่แน่นอนเท่านั้นในข้อมูลเซ็นเซอร์แบบสัมบูรณ์เกี่ยวกับตำแหน่งเชิงมุมจะถูกเข้ารหัสโดยกลไกตัวอย่างเช่นบนดิสก์ออปติคัลในรูปแบบของแรสเตอร์ที่มีรหัสเฉพาะสำหรับแต่ละตำแหน่งของเพลา ดังนั้นตัวเข้ารหัสสัมบูรณ์จะให้ข้อมูลเกี่ยวกับตำแหน่งเพลานั่นคือ เกี่ยวกับพิกัดปัจจุบันทันทีหลังจากเปิดและสร้างสัญญาณทั้งในระหว่างการหมุนและในโหมดพัก เอนโค้ดเดอร์สัมบูรณ์จะไม่สูญเสียคุณค่าเมื่อกำลังสูญเสียพลังงานและหากในสภาวะที่ไม่ได้รับพลังงานเพลาตัวเข้ารหัสถูกหมุนในมุมที่แน่นอนหรือจำนวนรอบการหมุนจำนวนหนึ่งจากนั้นเมื่อแรงดันไฟฟ้าปรากฏตัวเข้ารหัสจะสร้างตำแหน่งเชิงมุมที่แท้จริงใหม่ของเพลา เนื่องจากคุณสมบัตินี้จึงไม่จำเป็นต้องทำการเคลื่อนย้ายชิ้นส่วนทางกลของเครื่องไปยังตำแหน่งเริ่มต้นหรือตามที่เรียกว่าตำแหน่งอ้างอิงหลังจากแต่ละระบบเริ่มทำงานซึ่งเป็นข้อได้เปรียบที่ไม่อาจโต้แย้งได้ของตัวเข้ารหัสแบบสัมบูรณ์ ข้อดีของการเข้ารหัสแบบสัมบูรณ์คือความจริงที่ว่ามันไม่ไวต่อสัญญาณรบกวน ในกรณีที่ตัวเข้ารหัสไม่สามารถอ่านได้อย่างเต็มที่ตัวอย่างเช่นหากเพลาหมุนเร็วเกินไปมุมการหมุนที่แน่นอนจะถูกบันทึกเมื่อความเร็วการหมุนลดลง แม้จะมีการหมุนของเพลาอย่างรวดเร็วตำแหน่งสามารถลงทะเบียนได้แม้ว่าจะมีความแม่นยำน้อยก็ตาม เพื่อจุดประสงค์นี้เฉพาะข้อมูลที่มาจากบิตที่เก่ากว่าเท่านั้นที่นำมาพิจารณานั่นคือ ข้อมูลที่บิดเบี้ยว (เนื่องจากความเร็วในการหมุนสูง) ที่มาจากตัวเลขที่ต่ำกว่านั้นจะถูกมองข้าม ตัวเข้ารหัสสัมบูรณ์ทนต่อการสั่นสะเทือนและการรบกวนประเภทอื่น ๆ ตั้งแต่ ข้อผิดพลาดที่เกิดจากการนับพัลส์ "false" ที่เป็นผลมาจากการสั่นสะเทือนจะถูกแยกออก
เพื่อความเข้าใจที่ชัดเจนขึ้นเกี่ยวกับหลักการของการทำงานของตัวเข้ารหัสสัมบูรณ์โดยเฉพาะอย่างยิ่งเหตุผลที่จำเป็นต้องใช้วิธีการพิเศษของการเข้ารหัสสัญญาณเมื่อสร้างตัวเข้ารหัสแบบสัมบูรณ์จะเหมาะสมที่จะระลึกถึงพื้นฐานของเทคโนโลยีดิจิทัลบางอย่างรวมถึง ประเภท / วิธีการเข้ารหัสหมายเลข / สัญญาณที่อธิบายด้านล่าง
รหัสไบนารี
คำว่า "ไบนารี" ในความหมายของ - ประกอบด้วยสองส่วนส่วนประกอบ ดังนั้นรหัสเลขฐานสองเป็นรหัสที่ประกอบด้วยอักขระสองสถานะเท่านั้นเช่นสีดำหรือสีขาวแสงสว่างหรือมืดตัวนำหรือฉนวน รหัสเลขฐานสองในเทคโนโลยีดิจิตอลเป็นวิธีการแทนข้อมูล (ตัวเลขคำและอื่น ๆ ) เป็นการรวมกันของอักขระสองตัวซึ่งสามารถกำหนดเป็น 0 และ 1 อักขระหรือหน่วยของ BC เรียกว่าบิต เหตุผลหนึ่งในการใช้งาน BC คือความเรียบง่ายและความน่าเชื่อถือของการรวบรวมข้อมูลในสื่อใด ๆ ในรูปแบบของการรวมกันของสถานะทางกายภาพเพียงสองตัวอย่างเช่นในรูปแบบของการเปลี่ยนแปลงหรือความมั่นคงของฟลักซ์แสงเมื่ออ่านจากแผ่นรหัสออปติคัล
ตารางด้านล่างแสดงคุณสมบัติการเข้ารหัสหลักสองประการ - ไบนารี การเข้ารหัสและการเข้ารหัส ตามสีเทา (ซึ่งจะมีการอธิบายรายละเอียดเพิ่มเติมในภายหลัง) รวมถึงวิธีการนำเสนอข้อมูลในระบบตัวเลขต่างๆ
สำหรับระบบตัวเลขที่แตกต่างกันจะใช้ตัวย่อต่อไปนี้ในตาราง:
ทศนิยม จำนวน = ทศนิยม = ธันวาคม
ทศนิยมฐานสอง จำนวน = ทศนิยมรหัสไบนารี = BCD
เลขฐานสิบหก จำนวน = เลขฐานสิบหก = HEX
| ปกติ (ไบนารี) การเข้ารหัส | การเข้ารหัสสีเทา |
||||
| ธันวาคม |
BCD |
HEX |
ธันวาคม | BCD | HEX |
| 0 | 0000 | 0h | 0 | 0000 | 0h |
| 1 | 0001 | 1h | 1 | 0001 | 1h |
| 2 | 0010 | 2h | 3 | 001 1 | 3h |
| 3 | 0011 | 3h | 2 | 0010 | 2h |
| 4 | 0100 | 4h | 6 | 01 10 | 6h |
| 5 | 0101 | 5H | 7 | 0111 | 7h |
| 6 | 0110 | 6h | 5 | 010 1 | 5H |
| 7 | 0111 | 7h | 4 | 0100 | 4h |
| 8 | 1000 | 8h | 12 | 1 100 | Ch |
| 9 | 100 1 | 9h | 13 | 1101 | Dh |
| 10 | 1010 | อา | 15 | 111 1 | Fh |
| 11 | 1011 | Bh | 14 | 1110 | เอ๊ะ |
| 12 | 1100 | Ch | 10 | 10 10 | อา |
| 13 | 1101 | Dh | 11 | 1011 | Bh |
| 14 | 1110 | เอ๊ะ | 9 | 100 1 | 9h |
| 15 | 1111 | Fh | 8 | 1000 | 8h |
รหัสไบนารี่ (ทศนิยมรหัสไบนารี่)
รหัสทศนิยมฐานสองเป็นรหัสที่ใช้กันอย่างแพร่หลายซึ่งสามารถประมวลผลได้โดยตรงโดยไมโครโปรเซสเซอร์และเป็นรหัสหลักสำหรับการประมวลผลสัญญาณดิจิตอล รหัสทศนิยมฐานสองประกอบด้วยเพียง 0 และ 1
จำนวนมากที่สุดที่สามารถแสดงในรหัสไบนารี่ได้นั้นขึ้นอยู่กับจำนวนของตัวเลขที่ใช้นั่นคือ ในจำนวนบิตในการรวมกันแสดงจำนวน ตัวอย่างเช่นหากต้องการแสดงค่าตัวเลขตั้งแต่ 0 ถึง 7 จะเพียงพอที่จะมี 3 บิตเช่น รหัส 3 บิต
รหัสเลขฐานสองคือรหัสที่มีหลายขั้นตอน ซึ่งหมายความว่าเมื่อย้ายจากตำแหน่งหนึ่ง (ค่า) ไปยังตำแหน่งอื่นหลายบิตสามารถเปลี่ยนพร้อมกันได้ ตัวอย่างเช่นหมายเลข 3 ในรหัสไบนารี่ = 011 หมายเลข 4 ในรหัสไบนารี่ = 100 ดังนั้นเมื่อเปลี่ยนจาก 3 เป็น 4 สถานะจะถูกสลับกลับเป็นตรงกันข้ามทั้ง 3 บิตในเวลาเดียวกัน การอ่านรหัสดังกล่าวนำไปสู่ความจริงที่ว่าเนื่องจากความไม่สมบูรณ์ของผู้อ่านตัวอย่างเช่นเนื่องจากความคลาดเคลื่อนที่หลีกเลี่ยงไม่ได้ (ความคลาดเคลื่อน) ในการผลิตดิสก์โค้ดการเปลี่ยนแปลงข้อมูลจากแต่ละแทร็คนั้นไม่เคยเกิดขึ้นพร้อมกัน เป็นผลให้ในช่วงการเปลี่ยนภาพจากหมายเลขหนึ่งไปยังอีกข้อมูลสั้น ๆ (หรืออย่างถาวรในกรณีที่เพลาเข้ารหัสหยุดโดยตรงที่ส่วนการเปลี่ยนแปลงที่สำคัญ!) ออกมาพร้อมกับข้อมูลที่ไม่ถูกต้องเกี่ยวกับตำแหน่งของเพลา ดังนั้นในส่วนของการเปลี่ยนแปลงข้างต้นจากหมายเลข 3 ถึงหมายเลข 4 เอาต์พุตของหมายเลข 7 จึงมีความเป็นไปได้สูงตัวอย่างเช่นเมื่อบิตบิตที่สำคัญที่สุดระหว่างการเปลี่ยนแปลงเปลี่ยนค่าของบิตก่อนหน้าบิตอื่น ดังนั้นการใช้รหัสไบนารี่ปกติสามารถมีความน่าจะเป็นสูงส่งผลให้จำนวนที่อยู่ไกลจากค่าที่แท้จริงและเป็นผลให้การตอบสนองที่ไม่แน่นอนของระบบควบคุมหรือตัวควบคุมไปยังสัญญาณเข้ารหัสบิดเบี้ยว เพื่อหลีกเลี่ยงปัญหานี้จึงใช้รหัสขั้นตอนเดียวที่เรียกว่าเช่นรหัสสีเทา
รหัสสีเทา (รหัสสีเทา)
รหัสสีเทา (รหัสสีเทา - ตั้งชื่อตามนักฟิสิกส์ชาวอเมริกันแฟรงค์เกรย์) เหมาะสำหรับระบบระบุตำแหน่งเชิงกลรวมถึง ตัวเข้ารหัสแน่นอน รหัสสีเทาจะดีกว่าไบนารีสามัญที่มีคุณสมบัติของความมั่นคงของการรวมกันแบบไบนารี: การเปลี่ยนหมายเลขรหัสโดยหนึ่งสอดคล้องกับการเปลี่ยนรหัสชุด เพียงหนึ่งเดียว ปล่อย ดังนั้นรหัสสีเทาจึงเรียกว่ารหัสขั้นตอนเดียว มันถูกสร้างขึ้นบนพื้นฐานของไบนารีตามกฎต่อไปนี้: ลำดับสูงยังคงไม่เปลี่ยนแปลงและการปล่อยแต่ละครั้งต่อมาจะถูกคว่ำถ้าหลักก่อนหน้าของรหัสไบนารีแหล่งที่มาเท่ากับหนึ่ง
มันสามารถเห็นได้จากตารางด้านบนว่าหมายเลขที่แสดงโดยรหัสสีเทาเมื่อย้ายจากหมายเลขหนึ่งไปยังอีกหมายเลขหนึ่ง (เพื่อนบ้าน) เปลี่ยนสถานะของมันในข้อมูลบิตเดียวในขณะที่ในรหัสไบนารี่บิตหลายบิต (บิต) สามารถเปลี่ยนสถานะของพวกเขาพร้อมกัน บิตเปลี่ยนสถานะเมื่อย้ายจากหมายเลขหนึ่งไปอีกหมายเลขหนึ่งในตารางจะถูกทำเครื่องหมายด้วยสีแดง
ในกรณีของการใช้รหัสสีเทาข้อผิดพลาดในการอ่านข้อมูลเกี่ยวกับการเปลี่ยนจากหมายเลขหนึ่งไปยังอีกหมายเลขหนึ่งจะนำไปสู่ความจริงที่ว่าการเปลี่ยนแปลงนี้จะเปลี่ยนในเวลาเพียงเล็กน้อยเท่านั้น แต่การออกค่าที่ไม่ถูกต้องทั้งหมดของตำแหน่งเชิงมุม นี่เป็นเรื่องจริงโดยเฉพาะอย่างยิ่งสำหรับเซ็นเซอร์ที่ตัวส่ง / แหล่งข้อมูล (ตัวอย่างเช่นตำแหน่งของเพลาเข้ารหัส) เป็นองค์ประกอบเชิงกล ในกรณีของตัวเข้ารหัสสัมบูรณ์นี่คือแผ่นดิสก์ออปติคัลที่มีเครื่องหมายที่ใช้กลไกโดยที่ข้อผิดพลาดทางเรขาคณิตน้อยที่สุด / ออฟเซ็ตของแทร็กแสง / เซกเตอร์หลายอันที่สัมพันธ์กันจะไม่ถูกแยกออกเนื่องจากข้อผิดพลาดการพิมพ์ออฟเซ็ต รูปภาพด้านล่างแสดงดิสก์ตัวเข้ารหัสที่มีรูปแบบ (แรสเตอร์) ในรูปแบบโค้ดสีเทา
 ตัวเข้ารหัสดิสก์แบบสัมบูรณ์พร้อมแรสเตอร์ ในรหัสสีเทา
ตัวเข้ารหัสดิสก์แบบสัมบูรณ์พร้อมแรสเตอร์ ในรหัสสีเทา
ข้อดีของรหัสเทาคือความสามารถในการสะท้อนข้อมูล ดังนั้นการย้อนกลับบิตที่สำคัญที่สุดคุณสามารถเปลี่ยนทิศทางการนับได้ ฟังก์ชั่นนี้ดำเนินการโดยอินพุตที่เรียกว่า“ ส่วนประกอบ” ขึ้นอยู่กับศักยภาพของอินพุตนี้เอาต์พุตของเอนโค้ดเดอร์จะเพิ่มขึ้นหรือลดลงพร้อมกับทิศทางการหมุนของแกนทางกายภาพที่เหมือนกัน
เนื่องจากข้อมูลที่แสดงในรหัสสีเทาเป็นของตัวอักษรที่เข้ารหัสอย่างหมดจดไม่ถือของจริง ข้อมูลตัวเลขมีความจำเป็นต้องแปลงเป็นรหัสไบนารี่มาตรฐาน (ไบนารี่) ก่อนดำเนินการต่อไป แปลงรหัสสีเทาให้เป็นที่คุ้นเคย รหัสไบนารี สามารถดำเนินการทางโปรแกรม (ในคอนโทรลเลอร์) หรือใช้วงจรอย่างง่ายพร้อมอินเวอร์เตอร์และองค์ประกอบเชิงตรรกะ“ พิเศษหรือ” (XOR) ดังแสดงในแผนภาพด้านล่าง:
 วงจรการแปลงรหัสสีเทา รหัสไบนารี
วงจรการแปลงรหัสสีเทา รหัสไบนารี
หมายเหตุ:
* สามารถแปลงรหัสสีเทาแบบลอจิคัลเป็นรหัสไบนารีเมื่อเทอร์มินัล Vin เชื่อมต่อกับ 0 V.
** อินเวอร์เตอร์
*** พิเศษหรือ
สีเทาส่วนเกิน-Code
รหัสสีเทาหนึ่งขั้นตอนปกติเหมาะสำหรับการอนุญาตที่สามารถแสดงเป็นตัวเลขยกกำลัง 2 ในกรณีที่จำเป็นต้องมีการแก้ไขปัญหาอื่น ๆ จากรหัสสีเทาปกติส่วนกลางจะถูกตัดออกและใช้ ดังนั้นรหัส "หนึ่งขั้นตอน" จะถูกรักษาไว้ อย่างไรก็ตามช่วงตัวเลขไม่ได้เริ่มต้นจากศูนย์ แต่ถูกเลื่อนด้วยค่าที่แน่นอน เมื่อประมวลผลข้อมูลจากสัญญาณที่สร้างขึ้นครึ่งหนึ่งของความแตกต่างระหว่างความละเอียดดั้งเดิมและความละเอียดที่ลดลงจะถูกหักออก สิทธิ์เช่นเช่น 360 °สำหรับการแสดงออกของมุมมักนำมาใช้โดยวิธีนี้ ดังนั้นรหัสสีเทา 9 บิตเท่ากับ 512 ขั้นตอนตัดทั้งสองด้านด้วย 76 ขั้นตอนจะเท่ากับ 360 °
ระบบการวัดของตัวเข้ารหัสแสงแบบสัมบูรณ์ประกอบด้วยส่วนประกอบหลักดังต่อไปนี้:
- เพลาหมุนติดตั้งอยู่บนสองแบริ่ง;
- ดิสก์แสงเข้ารหัสติดตั้งบนเพลา;
- LED อินฟราเรด
- เมทริกซ์การอ่านค่า optoelectronic (โฟโตไดโอด)
- วงจรประมวลผลสัญญาณ
แหล่งกำเนิดแสงทำหน้าที่เป็น LED, รังสีอินฟราเรดซึ่งส่องสว่างรหัสดิสก์และตกอยู่ในเมทริกซ์โฟโต้ทรานซิสเตอร์ที่อยู่ด้านหลังของดิสก์โค้ด ในแต่ละขั้นตอนของตำแหน่งเชิงมุมของดิสก์โค้ดพื้นที่ที่มืดของโค้ดจะป้องกันแสงจากการเข้าสู่โฟโตทรานซิสเตอร์ใด ๆ ของเมทริกซ์ที่อ่านได้ ดังนั้นส่วนที่มืด / แสงของแต่ละแทร็คจะถูกฉายลงบนเมทริกซ์ที่อ่านได้และต่อมาจะถูกแปลงเป็นสัญญาณไฟฟ้า ในทางกลับกันสัญญาณไฟฟ้านั้นถูกจัดทำขึ้นโดยตัวขยายสัญญาณปฏิบัติการและตัวขับเอาต์พุตสำหรับการออกในรูปแบบของรหัสไบนารี่ การเปลี่ยนแปลงความเข้มของแหล่งกำเนิดแสงจะถูกบันทึกโดยใช้เซ็นเซอร์เพิ่มเติมและได้รับการชดเชยโดยวงจรอิเล็กทรอนิกส์
ตัวเข้ารหัสเทิร์นเดี่ยว
เซ็นเซอร์แบบเลี้ยวเดี่ยว (Single - Turn) เรียกว่าเซ็นเซอร์ (ตัวเข้ารหัส) ซึ่งให้ค่าสัมบูรณ์ภายในการปฏิวัติครั้งเดียวนั่นคือ ภายในการหมุนเวียน 360 ° หลังจากการปฏิวัติหนึ่งครั้งรหัสจะถูกสำรวจอย่างสมบูรณ์และเริ่มต้นอีกครั้งด้วยค่าเริ่มต้น เซ็นเซอร์เหล่านี้ส่วนใหญ่ทำหน้าที่วัดมุมของการหมุนและใช้เช่นในระบบเสาอากาศเครื่องกดข้อเหวี่ยงที่ผิดปกติเป็นต้น เป็นต้นความละเอียดของเครื่องเข้ารหัสแบบเลี้ยวเดียวถูกกำหนด / ระบุด้วยจำนวนบิต ตัวอย่างเช่นตัวเข้ารหัสที่มีความละเอียด 16 บิตหมายถึงความละเอียด 65,536 คะแนนต่อการปฏิวัติ

หลายตัวเข้ารหัส
การเคลื่อนที่เชิงเส้นต้องใช้ระบบการวัดที่ลงทะเบียนไม่เพียง แต่ตำแหน่งของเพลาในการปฏิวัติครั้งเดียวเท่านั้น แต่ยังมีการปฏิวัติอีกจำนวนหนึ่งด้วย ตัวอย่างเช่นในไดรฟ์เชิงเส้นหรือในงานการวัดโดยใช้ก้านวัดแบบมีฟันการใช้เอนโค้ดเดอร์นั้นเหมาะสมซึ่งนอกเหนือจากการวัดมุมการหมุนภายในการปฏิวัติครั้งเดียว (ขั้นตอนแรกของเครื่องเข้ารหัส) จำนวนการปฏิวัติยังจดทะเบียนด้วยเกียร์ชนิดอื่น ๆ จากรหัสออปติคัลดิสก์หลายรายการจึงก่อตัวเป็นตัวเข้ารหัสแบบหลายเลี้ยว (Multi-Turn) ความละเอียดของเอนโค้ดเดอร์ตัวเข้ารหัสมักจะแสดงแยกกันเป็นความละเอียดภายในหนึ่งรอบ + จำนวนการปฏิวัติในรูปแบบจำนวนบิต ดังนั้นการรวมกันของตัวเลขในชื่อของตัวเข้ารหัสในรูปแบบเช่น 1216 หมายถึงความละเอียด 12 บิตของการปฏิวัติ (4096 รอบการปฏิวัติ) และ 16 บิตในรอบ (65536 เครื่องหมายต่อการปฏิวัติ)
| เซ็นเซอร์มุมแบบเลี้ยวเดียว (Singleturn) | เซ็นเซอร์มุมซึ่งสำหรับตำแหน่งเพลาแต่ละตำแหน่งอยู่ภายใน หนึ่ง การหมุนเวียนให้ข้อมูลที่ชัดเจนและไม่ได้เข้ารหัส ข้อมูลเกี่ยวกับตำแหน่งของเพลาจะถูกบันทึกเมื่อแรงดันไฟฟ้าตก |
| เซ็นเซอร์มุมที่สมบูรณ์แบบหลายค่า (หลายค่า) | เซ็นเซอร์มุมซึ่งนอกเหนือจากข้อมูลเกี่ยวกับตำแหน่งของเพลาภายใน หนึ่ง ผลประกอบการให้ข้อมูลเกี่ยวกับ จำนวนการหมุนเวียน เพลา เซ็นเซอร์นี้ยังเก็บข้อมูลเมื่อแรงดันไฟฟ้าลดลง ตำแหน่งของเพลาภายในหนึ่งรอบการปฏิวัติและจำนวนการปฏิวัติจะถูกบันทึกทางกายภาพด้วยความช่วยเหลือของหลาย ๆ ตัวอย่างเช่นดิสก์รหัสออปติคัล |
| ASI | Asynchron-Serielles อินเตอร์เฟซ อินเตอร์เฟสข้อมูลแบบอะซิงโครนัสแบบอนุกรม ฮาร์ดแวร์ (ไดรเวอร์) มีการใช้งานตามมาตรฐาน EIA RS485 หรือ RS422 |
| ASIC | การบูรณาการสูงพิเศษชิปสั่งทำ ใช้ในเครื่องเข้ารหัสหลายชนิด |
| baudrate | ความถี่ (ความเร็ว) ของการส่งข้อมูลของอินเตอร์เฟสแบบอนุกรมเป็นบิตต่อวินาที |
| CAN-Bus Multi-Master-Bus-System | ส่วนต่อประสานการสื่อสารที่สามารถเชื่อมต่อกับเครือข่าย (อุปกรณ์สื่อสารสองสาย) ได้หลายอุปกรณ์ ปัจจุบันมีการปรับใช้โปรโตคอลปกติบางอย่างสำหรับ CANopen สำหรับเซ็นเซอร์มุมที่ถูกต้อง - DSP 406 |
| ความถี่ในการเปลี่ยนรหัส (freqency ขั้นตอน) |
จำนวนของป้ายกำกับ (ขั้นตอน) ต่อวินาทีสำหรับเครื่องเข้ารหัสแน่นอน สำหรับเซ็นเซอร์ที่มีความละเอียด 13 บิต (8192 แท็ก) และความถี่ในการเปลี่ยนรหัส 400 kHz ความเร็วไฟฟ้าสูงสุดจะอยู่ที่ 3,000 นาที -1 |
| Datavalid | เอาต์พุตการวิเคราะห์เพื่อตรวจสอบความถูกต้องของข้อมูลที่ส่งซ้ำ |
| ทิศทางการหมุน (ส่วนประกอบ) |
อินพุตควบคุมสำหรับการตั้งค่าลำดับข้อมูล ตั้งค่าทิศทางการหมุนในทิศทางตามเข็มนาฬิกาหรือทวนเข็มนาฬิกาซึ่งข้อมูลเอาต์พุตจะเพิ่มขึ้นเมื่อหมุน |
| ความถูกต้อง | ความเบี่ยงเบนของมุมการหมุน (ตำแหน่ง) วัดโดยตัวเข้ารหัสจากที่เกิดขึ้นจริง ความแม่นยำขึ้นอยู่กับความถูกต้องของการวาดภาพของรหัสบนตัวอย่างเช่นแผ่นดิสก์ออปติคัล ความเสี่ยง / เซกเตอร์ที่ฝากบนดิสก์มีความไม่เป็นเชิงเส้นนั่นคือ ความหนาแน่นของเครื่องหมายที่ไม่สม่ำเสมอรอบ ๆ เส้นรอบวงดิสก์นั้นเป็นตัวกำหนดความแม่นยำของตัวเข้ารหัส |
| ที่ตั้งไว้ล่วงหน้า (รีเซ็ต) | อินพุตควบคุมที่ช่วยให้คุณอ่านค่าศูนย์ของเอาท์พุทของเอนโค้ดเดอร์สัมบูรณ์ได้ทุกที่ในพื้นที่ความละเอียดทั้งหมดโดยไม่จำเป็นต้องวางตำแหน่งเพลาเชิงกล สำหรับโปรแกรมเข้ารหัสสัมบูรณ์ที่สามารถโปรแกรมได้ค่าใด ๆ (ออฟเซ็ต) สามารถตั้งโปรแกรมโดยใช้อินพุตนี้ |
| Profibus DP | Master-Slave-Bus-System พร้อมสายสื่อสารสองสายและไดรเวอร์ EIA RS485 ฮาร์ดแวร์ ระบุโปรโตคอล Profibus-DP ไว้สำหรับเครื่องเข้ารหัส |
| ความละเอียดต่อการปฏิวัติ | สำหรับเซ็นเซอร์เลี้ยวเดียว (Singleturn) หมายถึงจำนวนเครื่องหมายสูงสุดภายในการปฏิวัติครั้งเดียว สำหรับตัวเข้ารหัสที่ตั้งโปรแกรมได้พารามิเตอร์ของความละเอียดที่ต้องการภายในหนึ่งการหมุนของตัวเข้ารหัสสามารถกำหนดได้โดยผู้ใช้โดยทางโปรแกรม ในกรณีนี้โปรแกรมเปลี่ยนไฟล์แปลงความละเอียดจริง (ทางกายภาพ) ให้ต่ำลง |
| ความละเอียดรวม (ความละเอียดทั่วไป) |
ความละเอียดทั้งหมดของเครื่องเข้ารหัสหลายจุด (หลายเครื่อง) - ระบุจำนวนสูงสุดของเครื่องหมายภายในหนึ่งรอบและจำนวนสูงสุดของการปฏิวัติ สำหรับตัวเข้ารหัสที่ตั้งโปรแกรมได้พารามิเตอร์ของความละเอียดที่ต้องการภายในหนึ่งรอบการปฏิวัติและจำนวนรอบการปฏิวัติของตัวเข้ารหัสสามารถตั้งค่าได้โดยผู้ใช้โดยทางโปรแกรม ในกรณีนี้โปรแกรมเปลี่ยนไฟล์แปลงความละเอียดจริง (ทางกายภาพ) ให้ต่ำลง |
| SSI | Synchron-Serielles อินเตอร์เฟซ การถ่ายโอนข้อมูลจากเครื่องเปลี่ยนรหัสจะทำแบบซิงโครนัส (ทีละบิต) ผ่านพัลส์นาฬิกาภายนอก |
| Takt +, Takt - | สายนาฬิกาของสายอินเตอร์เฟส SSI สำหรับการถ่ายโอนข้อมูลแบบซิงโครนัส Takt + และ Takt - สร้างสายการสื่อสารที่แยกได้แบบ galvanically (จากสายไฟ) สำหรับสัญญาณนาฬิกาที่เครื่องเข้ารหัสจะได้รับ |
| ข้อมูล +, ข้อมูล - | สายข้อมูลของอินเตอร์เฟส SSI สำหรับการถ่ายโอนข้อมูลแบบซิงโครนัส Data + และ Data - เป็นสายการสื่อสารแบบแยกตัว (จากสายไฟ) แบบ galvanically สำหรับการส่งสัญญาณข้อมูลโดยตัวเข้ารหัส |

สามารถใช้ซอฟต์แวร์มาตรฐาน ระบบปฏิบัติการ Microsoft Windows เมื่อต้องการทำสิ่งนี้ให้เปิดเมนู "เริ่มต้น" บนคอมพิวเตอร์ของคุณในเมนูที่ปรากฏขึ้นให้คลิก "โปรแกรมทั้งหมด" เลือกโฟลเดอร์ "มาตรฐาน" และค้นหาแอปพลิเคชัน "เครื่องคำนวณ" ในนั้น ในเมนูด้านบนของเครื่องคิดเลขให้เลือก "ดู" แล้วเลือก "โปรแกรมเมอร์" แบบฟอร์มเครื่องคิดเลขถูกแปลง
ตอนนี้ป้อนหมายเลขที่จะถ่ายโอน ในหน้าต่างพิเศษภายใต้ช่องป้อนข้อมูลคุณจะเห็นผลลัพธ์ของการแปลงตัวเลขเป็นรหัสไบนารี่ ตัวอย่างเช่นหลังจากป้อนหมายเลข 216 คุณจะได้รับผลลัพธ์ 1101 1,000
หากคุณไม่มีคอมพิวเตอร์หรือสมาร์ทโฟนในมือคุณสามารถลองแปลงตัวเลขที่บันทึกเป็นเลขอารบิกเป็นรหัสไบนารี่ได้อย่างอิสระ ในการทำเช่นนี้คุณจะต้องหารจำนวนด้วย 2 จนกว่าจะถึงเวลาที่ยอดคงเหลือสุดท้ายยังคงอยู่หรือผลลัพธ์ถึงศูนย์ ดูเหมือนว่านี้ (ในตัวอย่างของหมายเลข 19):
19: 2 = 9 - ส่วนที่เหลือ 1
9: 2 = 4 - ส่วนที่เหลือ 1
4: 2 = 2 - ส่วนที่เหลือ 0
2: 2 = 1 - ส่วนที่เหลือ 0
1: 2 = 0 - 1 ถึง (เงินปันผลน้อยกว่าตัวหาร)
เขียนส่วนที่เหลือในทิศทางตรงกันข้าม - จากสุดไปสุดก่อน คุณจะได้รับผล 10011 - นี่คือเลขที่ 19 ในระบบเลขฐานสอง
ในการแปลงตัวเลขทศนิยมเศษส่วนเป็นระบบเลขฐานสองคุณต้องแปลงส่วนจำนวนเต็มของตัวเลขเศษส่วนเป็นระบบเลขฐานสองดังที่แสดงในตัวอย่างข้างต้น จากนั้นคุณต้องคูณเศษส่วนของจำนวนปกติด้วยฐานของระบบเลขฐานสอง เป็นผลมาจากการทำงานมีความจำเป็นต้องเลือกส่วนจำนวนเต็ม - มันใช้ค่าของตัวเลขแรกของตัวเลขในระบบเลขฐานสองหลังจากเครื่องหมายจุลภาค ขั้นตอนสุดท้ายของอัลกอริธึมเกิดขึ้นเมื่อส่วนที่เป็นเศษส่วนของผลิตภัณฑ์เป็นศูนย์หรือหากความแม่นยำในการคำนวณที่ต้องการ
นอกเหนือจากระบบเลขทศนิยมปกติแล้วยังมีวิธีอื่น ๆ อีกมากมายในการแสดงตัวเลขในคณิตศาสตร์รวมถึงไบนารี แบบฟอร์ม. เพื่อจุดประสงค์นี้มีการใช้อักขระเพียงสองตัวคือ 0 และ 1 ซึ่งทำให้ระบบไบนารีสะดวกสำหรับการใช้งานอุปกรณ์ดิจิตอลต่างๆในการทำงาน
การเรียนการสอน
ระบบตัวเลขในคณิตศาสตร์มีจุดประสงค์เพื่อแสดงสัญลักษณ์ของตัวเลข ในชีวิตประจำวันโดยทั่วไประบบทศนิยมจะใช้ซึ่งสะดวกมากสำหรับการคำนวณรวมถึงในใจ ในโลกของอุปกรณ์ดิจิตอลรวมถึงคอมพิวเตอร์ซึ่งตอนนี้กลายเป็นบ้านหลังที่สองสำหรับหลาย ๆ คนระบบเลขฐานสองนั้นแพร่หลายมากที่สุดและเมื่อความนิยมลดน้อยลงฐานแปดและฐานสิบหกก็ลดลง
ระบบทั้งสี่นี้มีคุณภาพทั่วไปเพียงอย่างเดียวนั่นคือตำแหน่ง ซึ่งหมายความว่ามูลค่าของแต่ละเครื่องหมายในจำนวนสุดท้ายขึ้นอยู่กับตำแหน่งที่มันยืน นี่แสดงถึงความคิดเกี่ยวกับความจุหลักในรูปแบบเลขฐานสองหน่วยความจุหลักคือตัวเลข 2 ในหน่วยทศนิยม - 10 และอื่น ๆ
มีอัลกอริทึมสำหรับการโอนหมายเลขจากระบบหนึ่งไปยังอีกระบบหนึ่ง วิธีการเหล่านี้ง่ายและไม่ต้องการความรู้มากนัก แต่การพัฒนาทักษะเหล่านี้ต้องใช้ความชำนาญบางอย่างซึ่งทำได้โดยการฝึกฝน
การแปลงตัวเลขจากระบบตัวเลขอื่นไปเป็นเลขฐานสองนั้นทำได้สองวิธี: แบ่งเป็น 2 ซ้ำ ๆ หรือโดยการบันทึกแต่ละหลักในรูปของสัญลักษณ์ไบนารีทั้งสี่ซึ่งเป็นค่าแบบตาราง แต่สามารถพบได้ด้วยตนเองเนื่องจากความเรียบง่าย
ใช้วิธีแรกเพื่อนำเข้า มุมมองไบนารี เลขทศนิยม ทั้งหมดนี้จะสะดวกกว่าเนื่องจากเลขทศนิยมนั้นง่ายต่อการใช้งานในใจ
ตัวอย่างเช่นแปลหมายเลข 39 ในรูปแบบไบนารี: หาร 39 ด้วย 2 - คุณจะได้ 19 และ 1 ในส่วนที่เหลือ ทำซ้ำอีกสองสามครั้งโดยการหารจนในที่สุดส่วนที่เหลือเท่ากับศูนย์และในขณะเดียวกันเขียนเศษเหลือกลางลงในสตริงจากขวาไปซ้าย ชุดผลลัพธ์และค่าศูนย์จะเป็นหมายเลขของคุณในรูปแบบไบนารี: 39/2 = 19 → 1; 19/2 = 9 → 1; 9/2 = 4 → 1; 4/2 = 2 → 0; 2/2 = 1 → 0; 1/2 = 0 → 1. ดังนั้นเลขฐานสองคือ 111001
ในการแปลงตัวเลขจากระบบตัวเลขบนฐาน 16 และ 8 เป็นรูปแบบไบนารีให้ค้นหาหรือสร้างตารางด้วยตัวเองตามการกำหนดที่สอดคล้องกันขององค์ประกอบตัวเลขและสัญลักษณ์ของแต่ละระบบ คือ: 0 0000, 1 0001, 2 0010, 3 0011, 4 0100, 5 0101, 6 0110, 7 0111, 8 1000, 9 1001, A 1010, B 1011, C 1100, D 1101, E 1110, F 1111 .
จดบันทึกแต่ละเครื่องหมายของหมายเลขดั้งเดิมตามข้อมูลในตารางนี้ ตัวอย่าง: เลขฐานแปด 37 = = 00110111 ในรูปแบบไบนารีเลขฐานสิบหก 5FEB12 = = 010111111110101100010010 ในรูปแบบไบนารี
วิดีโอที่เกี่ยวข้อง
ไม่ใช่จำนวนเต็มบางส่วน จำนวน สามารถเขียนเป็นทศนิยม ในกรณีนี้หลังจากเครื่องหมายจุลภาคคั่นส่วนจำนวนเต็ม จำนวนคุ้มค่าจำนวนตัวเลขที่ระบุลักษณะส่วนที่ไม่ครบถ้วน จำนวน. ในหลายกรณีจะสะดวกในการใช้ทศนิยม จำนวนหรือเป็นเศษส่วน ทศนิยม จำนวน สามารถแปลงเป็นเศษส่วน

คุณจะต้อง
การเรียนการสอน
หากตัวส่วนของเศษส่วนคือ 10, 100 หรือโดยทั่วไปคือ 10 ^ n โดยที่ n เป็นจำนวนเต็มบวกจากนั้นเศษส่วนนั้นสามารถเขียนเป็นทศนิยม จำนวนตำแหน่งทศนิยมกำหนดส่วนของเศษส่วนดังกล่าว มีค่าเท่ากับ 10 ^ n โดยที่ n คือจำนวนอักขระ ตัวอย่างเช่น 0.3 สามารถเขียนเป็น 3/10, 0.19 เป็น 19/100 เป็นต้น
ทีนี้ให้ส่วนจำนวนเต็มของทศนิยม จำนวน ไม่เท่ากับศูนย์ จากนั้นตัวเลขนี้สามารถแปลงเป็นเศษส่วนไม่สม่ำเสมอโดยที่ตัวเศษนั้นมากกว่าตัวส่วนหรือเป็นจำนวนผสม ตัวอย่างเช่น: 1.7 = 1+ (7/10) = 17/10, 2.29 = 2+ (29/100) = 229/100
หากในตอนท้ายของเศษส่วนทศนิยมคือหนึ่งศูนย์หรือมากกว่านั้นศูนย์เหล่านี้สามารถทิ้งและแปลงจำนวนที่มีจำนวนทศนิยมที่เหลือเป็นเศษส่วน ตัวอย่าง: 1.7300 = 1.73 = 173/100
วิดีโอที่เกี่ยวข้อง
แหล่งที่มา:
ส่วนหลักของซอฟต์แวร์สำหรับ Android นั้นเขียนด้วยภาษาโปรแกรม (PL) Java นักพัฒนาระบบยังมีเฟรมเวิร์กสำหรับโปรแกรมเมอร์เพื่อออกแบบแอพพลิเคชั่นใน C / C ++, Python และ Java Script ผ่านทางไลบรารี jQuery และ PhoneGap

ภาษาหลักสำหรับการพัฒนาโปรแกรม Android คือ Java ในการสร้างมาร์กอัปแอปพลิเคชันและองค์ประกอบส่วนติดต่อภาษามาร์กอัป XML จะถูกนำมาใช้ คุณสามารถเขียนโปรแกรมสำหรับ Android ใน Java ได้ในเกือบทุกสภาพแวดล้อมซอฟต์แวร์ แต่ผู้พัฒนาระบบปฏิบัติการแนะนำให้โปรแกรมเมอร์ใช้ Eclipse ฟังก์ชั่นคอมไพเลอร์รวมถึงโหมดการสร้างแอปพลิเคชั่นมือถือผ่านปลั๊กอิน Android Development Tools (ADT) ปลั๊กอินที่คล้ายกันนี้มีอยู่ในสภาพแวดล้อมยอดนิยมเช่น NetBeans และ IntelliJ IDEA นอกจากนี้ Motodev Studio สำหรับ Android สามารถใช้เขียนโค้ด Java ซึ่งใช้ Eclipse และอนุญาตให้เขียนโปรแกรมโดยตรงบน Google SDK
ไลบรารี C / C ++ สามารถใช้เพื่อเขียนบางโปรแกรมและส่วนของโค้ดซึ่งการประมวลผลต้องการความเร็วสูงสุด การใช้ PLs เหล่านี้สามารถทำได้ผ่านแพ็คเกจพิเศษสำหรับนักพัฒนา Android Native Development Kit ซึ่งมุ่งเน้นเฉพาะการสร้างแอปพลิเคชันที่ใช้ C ++
แพคเกจ Embarcadero RAD Studio XE5 ยังให้คุณสามารถเขียนแอปพลิเคชั่น Android ดั้งเดิม ในเวลาเดียวกันอุปกรณ์ Android หรืออีมูเลเตอร์หนึ่งตัวที่ติดตั้งบนคอมพิวเตอร์ก็เพียงพอสำหรับการทดสอบโปรแกรม นักพัฒนายังได้รับโอกาสในการเขียนโมดูลระดับต่ำบน C / C ++ โดยใช้ไลบรารี่มาตรฐานและไลบรารีไบโอนิคที่พัฒนาขึ้นสำหรับ Android
นอกจาก C / C ++ แล้วโปรแกรมเมอร์ยังมีโอกาสใช้ C # ซึ่งเป็นเครื่องมือที่มีประโยชน์เมื่อเขียนโปรแกรมดั้งเดิมสำหรับแพลตฟอร์ม การทำงานกับ C # กับ Android สามารถทำได้ผ่านอินเทอร์เฟซ Mono หรือ Monotouch อย่างไรก็ตามใบอนุญาตเริ่มต้นสำหรับการใช้ C # จะเสียค่าใช้จ่ายโปรแกรมเมอร์ $ 400 ซึ่งมีความเกี่ยวข้องเฉพาะเมื่อเขียนผลิตภัณฑ์ซอฟต์แวร์ขนาดใหญ่
PhoneGap ช่วยให้คุณพัฒนาแอปพลิเคชั่นที่ใช้ภาษาเช่น HTML, JavaScript (jQuery) และ CSS ในขณะเดียวกันโปรแกรมที่สร้างบนแพลตฟอร์มนี้เหมาะสำหรับระบบปฏิบัติการอื่น ๆ
รหัสไบนารีเป็นรูปแบบของข้อมูลการบันทึกในรูปแบบของคนและศูนย์ นี่คือตำแหน่งที่มีฐาน 2 วันนี้รหัสไบนารี่ (ตารางที่นำเสนอเล็กน้อยด้านล่างมีตัวอย่างของการเขียนตัวเลข) ใช้ในอุปกรณ์ดิจิตอลทั้งหมดโดยไม่มีข้อยกเว้น ความนิยมของมันเกิดจากความน่าเชื่อถือสูงและความเรียบง่ายของรูปแบบการบันทึกนี้ เลขคณิตไบนารีเป็นเรื่องง่ายมากตามลำดับมันใช้งานง่ายในระดับฮาร์ดแวร์ ส่วนประกอบ (หรือที่เรียกว่าตรรกะ) มีความน่าเชื่อถือมากเนื่องจากทำงานด้วยสถานะการทำงานเพียงสองสถานะ: หน่วยโลจิคัล (มีกระแส) และศูนย์โลจิคัล (ไม่มีกระแสไฟฟ้า) ดังนั้นจึงเปรียบเทียบได้ดีกับส่วนประกอบแบบอะนาล็อกที่มีการทำงานบนพื้นฐานชั่วคราว
เรามาดูกันว่าคีย์นี้เกิดขึ้นได้อย่างไร รหัสไบนารีหนึ่งบิตสามารถมีสองสถานะเท่านั้น: ศูนย์และหนึ่ง (0 และ 1) เมื่อใช้ตัวเลขสองหลักเป็นไปได้ที่จะบันทึกค่าสี่ค่า: 00, 01, 10, 11 ระเบียนสามหลักมีแปดสถานะ: 000, 001 ... 110, 111 ดังนั้นเราจึงพบว่าความยาวของรหัสไบนารีขึ้นอยู่กับจำนวนของตัวเลข นิพจน์นี้สามารถเขียนได้โดยใช้สูตรต่อไปนี้: N = 2m โดยที่: m คือจำนวนหลักและ N คือจำนวนชุดค่าผสม
ในไมโครโปรเซสเซอร์คีย์ดังกล่าวใช้เพื่อบันทึกข้อมูลที่ประมวลผลหลากหลาย ความกว้างบิตของรหัสไบนารีสามารถเกินหน่วยความจำภายในได้อย่างมีนัยสำคัญ ในกรณีเช่นนี้ตัวเลขที่มีความยาวใช้หลายเซลล์ของอุปกรณ์จัดเก็บข้อมูลและถูกประมวลผลโดยใช้คำสั่งหลายคำสั่ง ในกรณีนี้หน่วยความจำทั้งหมดที่ได้รับการจัดสรรสำหรับรหัสไบนารีหลายไบต์ถือเป็นหมายเลขหนึ่ง  ขึ้นอยู่กับความต้องการที่จะให้ข้อมูลนี้หรือว่าคีย์ประเภทต่อไปนี้มีความแตกต่าง:
ขึ้นอยู่กับความต้องการที่จะให้ข้อมูลนี้หรือว่าคีย์ประเภทต่อไปนี้มีความแตกต่าง:
พิจารณารายละเอียดของแต่ละคนให้มากขึ้น
เรามาดูกันว่าบันทึกแบบนี้คืออะไร ในรหัสจำนวนเต็มที่ไม่ได้ลงชื่อแต่ละหลัก (ไบนารี) หมายถึงพลังของสอง ในกรณีนี้จำนวนที่น้อยที่สุดที่สามารถเขียนได้ในรูปแบบนี้คือศูนย์และจำนวนสูงสุดสามารถแสดงโดยสูตรต่อไปนี้: M = 2 n -1 ตัวเลขสองตัวนี้กำหนดช่วงคีย์ที่สามารถแสดงรหัสไบนารีได้อย่างสมบูรณ์ ลองพิจารณาความเป็นไปได้ของรูปแบบการบันทึกที่กล่าวถึง เมื่อใช้คีย์ที่ไม่ได้รับการลงทะเบียนประเภทนี้ประกอบด้วยตัวเลขแปดหลักช่วงของตัวเลขที่เป็นไปได้จะอยู่ระหว่าง 0 ถึง 255 รหัสสิบหกบิตจะมีช่วงตั้งแต่ 0 ถึง 65535 ในตัวประมวลผลแปดบิตหน่วยความจำแปดส่วน . ทำงานกับปุ่มดังกล่าวให้คำสั่งพิเศษ
ในเลขฐานสองชนิดนี้เลขนำหน้าใช้เพื่อเขียนสัญลักษณ์ของตัวเลข ศูนย์สอดคล้องกับการบวกและหนึ่ง - การลบ อันเป็นผลมาจากการแนะนำของหมวดหมู่นี้ช่วงของรหัสตัวเลขจะถูกเลื่อนไปทางด้านลบ ปรากฎว่าคีย์เลขจำนวนเต็มแบบเลขฐานแปดแปดบิตสามารถเขียนตัวเลขในช่วงตั้งแต่ -127 ถึง +127 สิบหกบิต - อยู่ในช่วงตั้งแต่ -32767 ถึง +32767 ในไมโครโปรเซสเซอร์แปดบิตสำหรับการจัดเก็บรหัสดังกล่าวใช้สองภาคที่อยู่ติดกัน
ข้อเสียของการเขียนแบบนี้คือกุญแจและบิตหลักของกุญแจจะต้องถูกประมวลผลแยกต่างหาก อัลกอริทึมของโปรแกรมที่ทำงานกับรหัสเหล่านี้ซับซ้อนมาก ในการเปลี่ยนและไฮไลต์บิตสัญญาณจำเป็นต้องใช้กลไกในการปิดบังสัญลักษณ์นี้ซึ่งจะช่วยเพิ่มขนาดของซอฟต์แวร์ให้คมชัดขึ้นและลดความเร็วลง เพื่อกำจัดข้อเสียนี้ได้มีการนำคีย์ชนิดใหม่มาใช้ - reverse binary code 
รูปแบบการบันทึกนี้แตกต่างจากรหัสโดยตรงเฉพาะในที่หมายเลขติดลบจะได้รับโดยการย้อนกลับบิตทั้งหมดของคีย์ ในเวลาเดียวกันตัวเลขดิจิตอลและเครื่องหมายเหมือนกัน ด้วยเหตุนี้อัลกอริทึมสำหรับการทำงานกับรหัสประเภทนี้จึงง่ายขึ้นมาก อย่างไรก็ตามปุ่มย้อนกลับจำเป็นต้องใช้อัลกอริทึมพิเศษในการจดจำอักขระของตัวเลขตัวแรกเพื่อคำนวณค่าสัมบูรณ์ของตัวเลข รวมถึงการกู้คืนสัญลักษณ์ของค่าผลลัพธ์ ยิ่งไปกว่านั้นในรหัสถอยหลังและส่งต่อตัวเลขใช้สองปุ่มเพื่อเขียนเลขศูนย์ แม้ว่าค่านี้จะไม่มีเครื่องหมายบวกหรือลบ 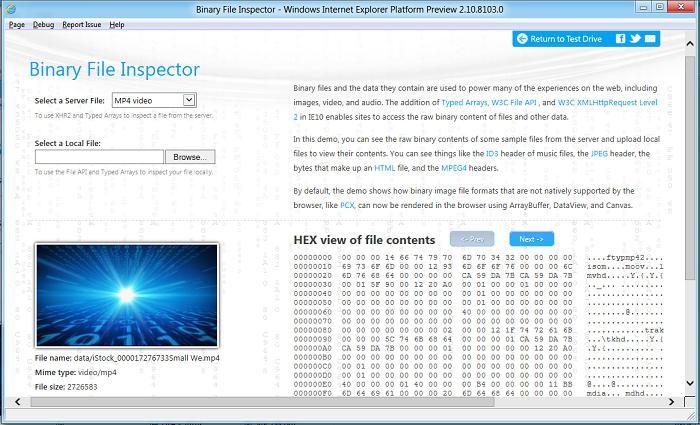
บันทึกประเภทนี้ไม่มีข้อเสียที่ระบุไว้ของปุ่มก่อนหน้า รหัสดังกล่าวอนุญาตให้มีการรวมโดยตรงของตัวเลขทั้งบวกและลบ ในขณะเดียวกันก็ไม่มีการวิเคราะห์บิตสัญญาณ ทั้งหมดนี้เกิดขึ้นได้จากความจริงที่ว่าตัวเลขเพิ่มเติมแสดงถึงแหวนธรรมชาติของสัญลักษณ์และไม่ใช่รูปแบบประดิษฐ์เช่นคีย์โดยตรงและผกผัน ยิ่งไปกว่านั้นปัจจัยสำคัญคือมันง่ายมากที่จะคำนวณการเพิ่มเติมในรหัสไบนารี่ เมื่อต้องการทำเช่นนี้ก็พอเพียงที่จะเพิ่มหนึ่งปุ่มย้อนกลับ เมื่อใช้รหัสตัวละครประเภทนี้ประกอบด้วยตัวเลขแปดหลักช่วงของตัวเลขที่เป็นไปได้จะอยู่ระหว่าง -128 ถึง +127 คีย์ 16 บิตจะมีช่วงตั้งแต่ -32768 ถึง +32767 ในตัวประมวลผลแปดบิตทั้งสองส่วนที่อยู่ติดกันจะถูกใช้เพื่อเก็บหมายเลขดังกล่าว
รหัสเพิ่มเติมแบบไบนารี่เป็นที่น่าสนใจจากเอฟเฟกต์ที่สังเกตซึ่งเรียกว่าปรากฏการณ์การแพร่กระจายสัญญาณ มาดูกันว่ามันหมายถึงอะไร ผลกระทบนี้คือในกระบวนการแปลงค่าไบต์เดียวเป็นค่าสองไบต์จะเพียงพอสำหรับแต่ละบิตของไบต์สูงเพื่อกำหนดค่าของบิตบิตของไบต์ต่ำ ปรากฎว่าคุณสามารถใช้บิตลำดับสูงเพื่อเก็บสัญญาณ ในเวลาเดียวกันค่าคีย์จะไม่เปลี่ยนแปลงเลย
รูปแบบการบันทึกนี้เป็นกุญแจสำคัญในขั้นตอนเดียว นั่นคือในกระบวนการของการเปลี่ยนแปลงจากค่าหนึ่งไปอีกค่าหนึ่งการเปลี่ยนแปลงข้อมูลเพียงหนึ่งบิต ในกรณีนี้ข้อผิดพลาดในการอ่านข้อมูลจะนำไปสู่การเปลี่ยนจากตำแหน่งหนึ่งไปอีกตำแหน่งหนึ่งโดยมีการเลื่อนเวลาเล็กน้อย อย่างไรก็ตามการได้รับผลลัพธ์ที่ผิดอย่างสมบูรณ์ของตำแหน่งเชิงมุมในกระบวนการนี้จะถูกยกเว้น ข้อดีของรหัสดังกล่าวคือความสามารถในการสะท้อนข้อมูล ตัวอย่างเช่นโดยการย้อนกลับบิตที่มีลำดับสูงคุณสามารถเปลี่ยนทิศทางของการอ้างอิงได้ นี่เป็นเพราะอินพุตควบคุมสมบูรณ์ ในกรณีนี้ค่าเอาท์พุทสามารถเป็นได้ทั้งการเพิ่มและลดลงพร้อมทิศทางการหมุนของแกนในทิศทางเดียว เนื่องจากข้อมูลที่บันทึกไว้ในคีย์สีเทาเป็นอักขระที่มีรหัสเฉพาะที่ไม่ได้มีข้อมูลตัวเลขจริงก่อนจึงจะสามารถใช้งานได้ก่อนจึงจะต้องแปลงเป็นรูปแบบไบนารีปกติของบันทึก สิ่งนี้ทำด้วยความช่วยเหลือของตัวแปลงพิเศษ - ตัวถอดรหัส Gray-Binar อุปกรณ์นี้สามารถนำไปใช้กับองค์ประกอบตรรกะพื้นฐานได้อย่างง่ายดายทั้งในฮาร์ดแวร์และซอฟต์แวร์
คีย์ขั้นตอนเดียวแบบมาตรฐานของเกรย์เหมาะสำหรับโซลูชันที่แสดงเป็นตัวเลขสองตัว ในกรณีที่จำเป็นต้องใช้โซลูชันอื่น ๆ เฉพาะส่วนตรงกลางเท่านั้นที่ถูกตัดออกจากรูปแบบการบันทึกและใช้ ดังนั้นคีย์หนึ่งขั้นตอนจะถูกบันทึก อย่างไรก็ตามในรหัสดังกล่าวจุดเริ่มต้นของช่วงตัวเลขไม่เป็นศูนย์ มันจะเปลี่ยนเป็นค่าที่ระบุ ในกระบวนการประมวลผลข้อมูลจากพัลส์ที่สร้างขึ้นจะลบความแตกต่างครึ่งหนึ่งระหว่างความละเอียดเริ่มต้นและความละเอียดที่ลดลง 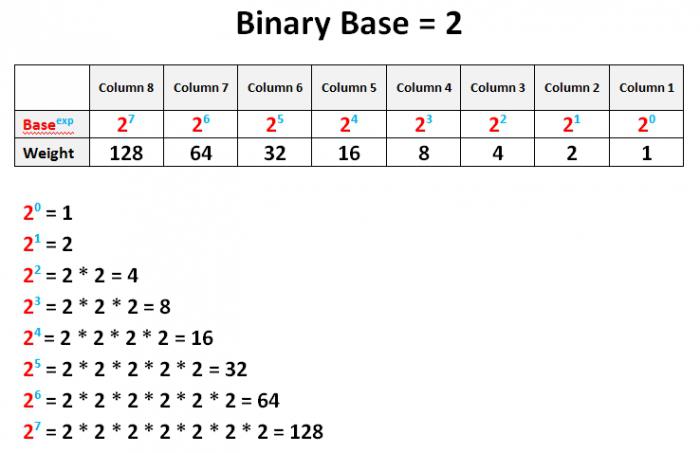
ในการทำงานมีความจำเป็นต้องใช้งานไม่เพียง แต่กับจำนวนเต็ม แต่ยังเป็นเศษส่วน หมายเลขดังกล่าวสามารถเขียนได้ด้วยความช่วยเหลือของรหัสโดยตรงผกผันและรหัสเพิ่มเติม หลักการสร้างคีย์ที่กล่าวถึงนั้นเหมือนกับของจำนวนเต็ม จนถึงตอนนี้เราเชื่อว่าเครื่องหมายจุลภาคควรอยู่ทางด้านขวาของบิตลำดับต่ำ แต่มันไม่ใช่ มันสามารถอยู่ที่ด้านซ้ายของตัวเลขที่สำคัญที่สุด (ในกรณีนี้เพียงเศษส่วนเท่านั้นที่สามารถเขียนเป็นตัวแปร) และในช่วงกลางของตัวแปร (สามารถเขียนค่าผสม) 
แบบฟอร์มนี้ใช้ในการบันทึกหรือในทางกลับกัน - มีขนาดเล็กมาก ตัวอย่างเช่นระยะทางระหว่างดวงดาวหรือขนาดของอะตอมและอิเล็กตรอน เมื่อคำนวณค่าเหล่านี้จะต้องใช้รหัสไบนารีที่มีขนาดใหญ่มาก อย่างไรก็ตามเราไม่จำเป็นต้องคำนึงถึงระยะทางของจักรวาลด้วยความแม่นยำระดับมิลลิเมตร ดังนั้นสัญกรณ์จุดคงที่ในกรณีนี้จึงไม่มีประสิทธิภาพ ในการแสดงรหัสดังกล่าวจะใช้รูปแบบพีชคณิต นั่นคือตัวเลขจะถูกเขียนเป็น mantissa คูณด้วยสิบเท่าที่แสดงลำดับที่ต้องการของตัวเลข คุณควรรู้ว่า mantissa ไม่ควรมากกว่าหนึ่งและหลังเครื่องหมายจุลภาคไม่ควรเขียน 
เป็นที่เชื่อกันว่า แคลคูลัสไบนารี มันถูกประดิษฐ์ขึ้นเมื่อต้นศตวรรษที่ 18 โดย Gottfried Leibnitz นักคณิตศาสตร์จากประเทศเยอรมนี อย่างไรก็ตามเมื่อเร็ว ๆ นี้นักวิทยาศาสตร์ค้นพบนานก่อนที่เกาะโพลีเนเซียนของ Mangarev การคำนวณทางคณิตศาสตร์ประเภทนี้ถูกนำมาใช้ แม้ว่าการล่าอาณานิคมจะทำลายระบบหมายเลขเดิมเกือบทั้งหมดนักวิทยาศาสตร์ได้กู้คืนบัญชีไบนารีและทศนิยมที่ซับซ้อน นอกจากนี้นักวิทยาศาสตร์ Cognitive Nunes ให้เหตุผลว่าการเข้ารหัสโค้ดไบนารี่ถูกใช้ในประเทศจีนโบราณตั้งแต่ต้นศตวรรษที่ 9 อี อารยธรรมโบราณอื่น ๆ เช่นมายาใช้การรวมกันของระบบทศนิยมและไบนารีที่ซับซ้อนเพื่อติดตามช่วงเวลาและปรากฏการณ์ทางดาราศาสตร์
| บทความที่เกี่ยวข้อง: | |
|
ความฝันของกุญแจหรือพวงกุญแจคืออะไร
คุณเห็นกุญแจสู่ประตูในฝันของคุณ? ดีใจ - การตัดสินใจของบางคน ... ขอแสดงความยินดีกับช่างทำผมที่สวยงาม
สุขสันต์วันเกิดตัวช่วยสร้างหวีกรรไกรเครื่องเป่าผมตัวช่วยที่ยอดเยี่ยม! คุณ ... ร่างกายของผู้หญิงเปลี่ยนไปอย่างไร
สัปดาห์ที่ 8 ของการตั้งครรภ์สอดคล้องกับสัปดาห์ที่ 6 ของตัวอ่อนและหาก ... | |




